Đồ án sinh viên Cranes FPT: Automotive Map Navigation System – Nền tảng dẫn đường thông minh cho ô tô hiện đại
Tin nổi bật - 29 Tháng 12, 2025
Trong chương trình đào tạo Phát triển phần mềm ô tô thông minh tại Cranes FPT, các đồ án học kỳ được xây dựng với định hướng bám sát thực tế doanh nghiệp, giúp sinh viên từng bước tiếp cận các hệ thống phần mềm đang được ứng dụng trên xe hơi hiện đại. Đồ án “Automotive Map Navigation System” của Nhóm 3 lớp M1.2507.E0 là một dự án tiêu biểu, thể hiện rõ tư duy hệ thống và năng lực lập trình Automotive ngay từ học kỳ đầu tiên.
Dự án được thực hiện bởi nhóm sinh viên gồm Nguyễn Phương Duy Thắng (Trưởng nhóm), Bùi Tấn Hưng, Nguyễn Quốc Đạt và Huỳnh Anh Tuấn, dưới sự hướng dẫn của giảng viên Ngô Quang Lộc, trong học kỳ 1 của khóa học Phát triển phần mềm ô tô thông minh tại Cranes FPT.
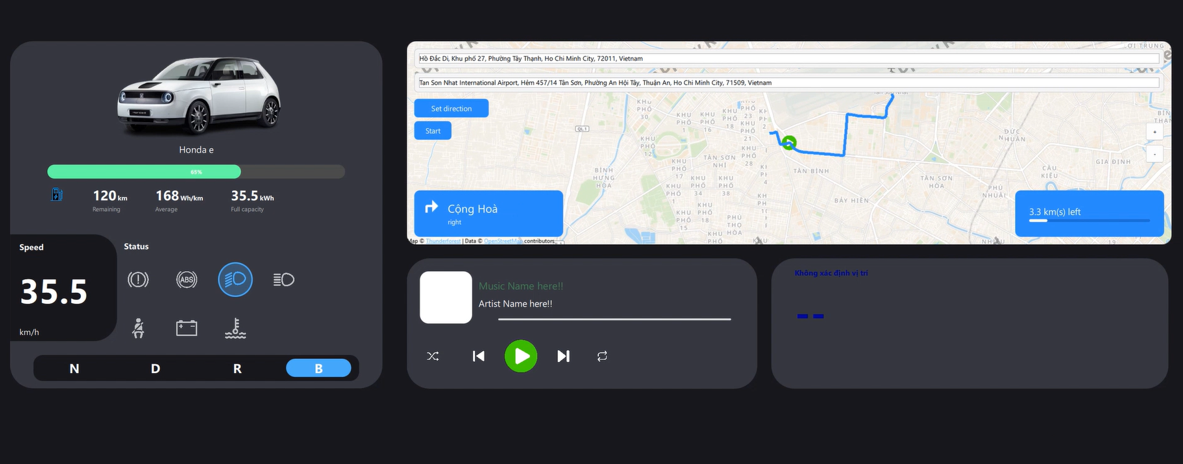
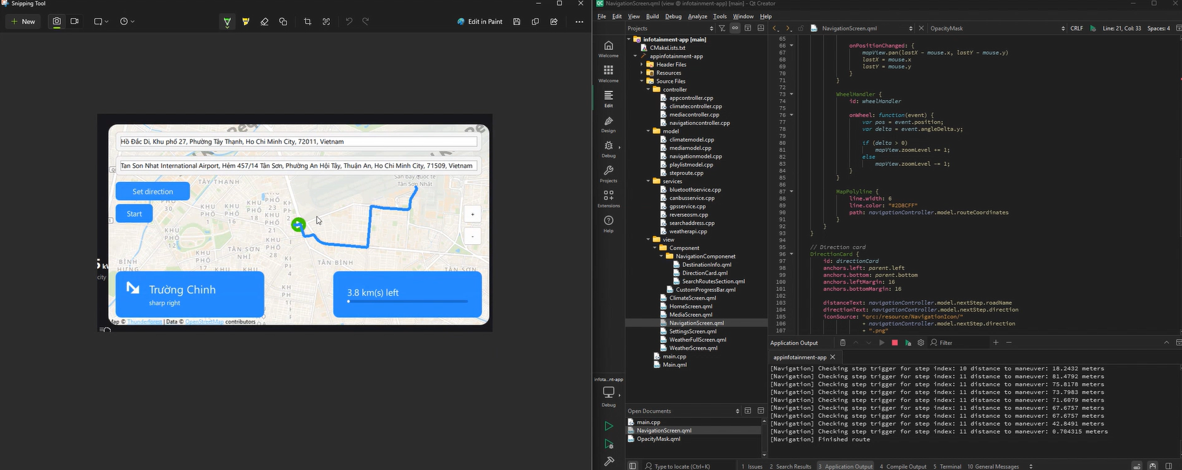
Automotive Map Navigation System là ứng dụng mô phỏng hệ thống bản đồ và dẫn đường trên ô tô, hỗ trợ người lái trong việc hiển thị bản đồ, xác định vị trí hiện tại, theo dõi lộ trình và mô phỏng quá trình di chuyển. Ứng dụng được phát triển bằng Qt Creator, sử dụng các module QtLocation và QtPositioning để xử lý bản đồ, GPS và các chức năng liên quan đến dẫn đường.
Nhóm lựa chọn đề tài này xuất phát từ nhu cầu thực tiễn của ngành Automotive, nơi các hệ thống bản đồ và navigation là thành phần cốt lõi trên màn hình trung tâm IVI của xe. Thông qua dự án, sinh viên có cơ hội vận dụng kiến thức về C/C++, Qt, QML và quy trình phát triển phần mềm Automotive để xây dựng một sản phẩm mang tính ứng dụng cao, có khả năng mở rộng trong tương lai.
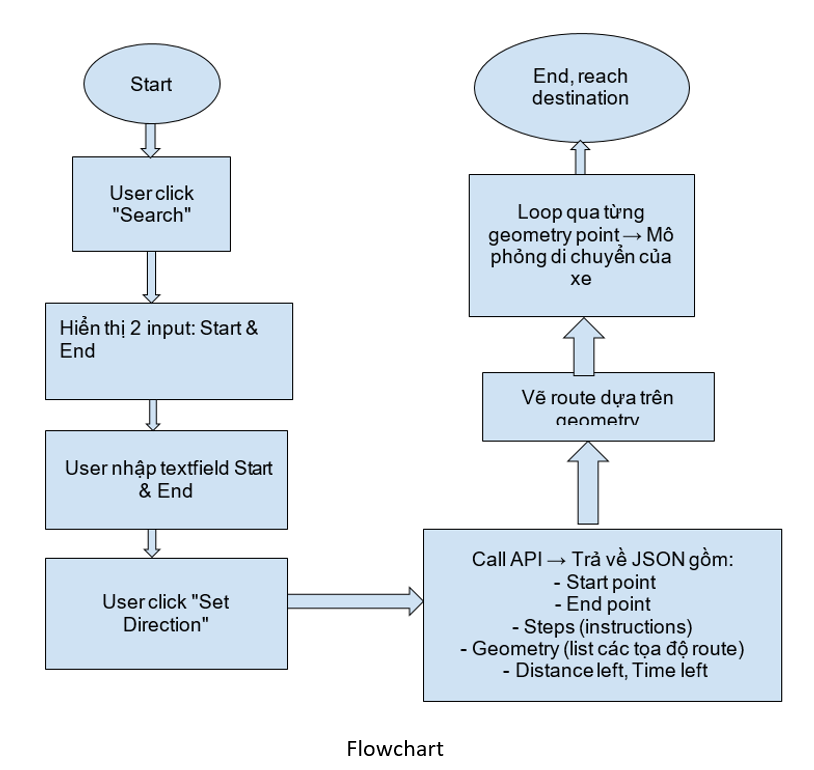
Mục tiêu chính của đồ án là xây dựng một hệ thống bản đồ hoạt động trên ô tô với cấu trúc rõ ràng, giao diện trực quan và luồng tương tác người dùng hợp lý. Nhóm tập trung thiết kế kiến trúc phần mềm kết nối chặt chẽ giữa QML và C++, phân tích chức năng của từng module như tải bản đồ, lấy tọa độ vị trí, cập nhật marker xe, mô phỏng tuyến đường và theo dõi quá trình di chuyển theo thời gian thực. Bên cạnh đó, dự án còn giúp sinh viên rèn luyện kỹ năng làm việc nhóm, quản lý tiến độ và giải quyết vấn đề trong quá trình triển khai.
Về mặt kỹ thuật, hệ thống được thiết kế theo mô hình MVC nhằm tách biệt logic nghiệp vụ, giao diện người dùng và điều khiển luồng dữ liệu. Trong phạm vi đề tài, nhóm tập trung vào các chức năng cốt lõi của một module bản đồ trên ô tô, bao gồm hiển thị bản đồ nền OpenStreetMap thông qua QtLocation, xác định vị trí hiện tại bằng QtPositioning, hiển thị marker vị trí xe, mô phỏng tuyến đường và theo dõi lộ trình di chuyển. Giao diện điều khiển được xây dựng trên Qt/QML với tiêu chí đơn giản, dễ sử dụng và phù hợp môi trường nhúng.
Trong quá trình thực hiện, nhóm gặp không ít khó khăn do giới hạn về thời gian, kiến thức và dữ liệu thực tế. Ứng dụng hiện tại chủ yếu sử dụng mock data cho GPS, chưa tích hợp API tính toán đường đi thực tế và chưa kết nối với các dịch vụ bản đồ chuyên nghiệp như Google Maps, HERE hay Mapbox. Tuy nhiên, thông qua việc chia nhỏ vấn đề, kiểm thử từng bước và liên tục cải tiến, nhóm đã mô phỏng thành công luồng hoạt động cơ bản của một hệ thống dẫn đường trên ô tô, từ giao diện QML đến xử lý logic bằng C++.
Sản phẩm hoàn thiện sở hữu giao diện trực quan, khả năng hiển thị và theo dõi lộ trình ổn định, hoạt động mượt mà trên nền tảng Qt và dễ dàng mở rộng thêm các tính năng mới. Việc kết nối hiệu quả giữa QML và C++ theo mô hình MVC giúp luồng dữ liệu rõ ràng, tạo nền tảng tốt cho việc phát triển các ứng dụng Automotive phức tạp hơn trong tương lai.
Sau dự án, sinh viên rút ra nhiều bài học quan trọng về thiết kế kiến trúc tổng thể ngay từ đầu, làm việc với API bên thứ ba, tổ chức giao tiếp giữa C++ và QML thông qua signal và slot, cũng như tầm quan trọng của việc kiểm thử từng module trước khi tích hợp toàn hệ thống. Bên cạnh kiến thức chuyên môn, kỹ năng làm việc nhóm, quản lý dự án và tối ưu hệ thống cũng được cải thiện rõ rệt.
Chia sẻ về đồ án, Nguyễn Phương Duy Thắng cho biết dự án đã giúp bạn hiểu sâu hơn về lập trình nhúng Automotive và cách thiết kế giao diện cho các ứng dụng thực tế trên ô tô. Các thành viên khác trong nhóm cũng đánh giá đây là bước đệm quan trọng để tiếp tục nghiên cứu và phát triển chuyên sâu trong lĩnh vực phần mềm ô tô thông minh.
Theo nhận xét từ giảng viên hướng dẫn, Automotive Map Navigation System là một đồ án có tính thực tiễn cao, thể hiện sự sáng tạo trong thiết kế, khả năng tích hợp hệ thống và lập trình giao diện Automotive. Dự án được đánh giá hoàn thành tốt mục tiêu đề ra, có tiềm năng mở rộng với các tính năng nâng cao như dẫn đường từng chặng, tích hợp GPS thực, giọng nói chỉ đường và tối ưu trên thiết bị nhúng thật.
Đồ án Automotive Map Navigation System một lần nữa khẳng định định hướng đào tạo “học đi đôi với làm” tại Cranes FPT, nơi sinh viên được tiếp cận công nghệ thực tế, rèn luyện tư duy kỹ sư và sẵn sàng đáp ứng yêu cầu của ngành công nghiệp Automotive đang phát triển mạnh mẽ.
Cùng xem demo đồ án của nhóm qua video bên dưới nhé!
Giảng viên Nguyễn Phát Tài
Chia sẻ
TIN LIÊN QUAN
Cơ hội nghề nghiệp mới của kỷ nguyên Drone Và tự hành
Trong bối cảnh chuyển đổi số toàn cầu diễn ra mạnh mẽ, bên cạnh kinh tế số, kinh tế xanh hay kinh tế AI, kinh…

Mô phỏng máy bán hàng tự động trên FPGA – Đồ án hệ thống số từ sinh viên Cranes FPT
Trong khuôn khổ buổi bảo vệ đồ án học phần HDCD-PRJ2 học kỳ 2 của lớp C2502E, nhóm sinh viên Cranes FPT đã giới thiệu…